Des chercheurs de l’EPFL ont développé un robot-insecte ultra-léger. Doté de muscles artificiels souples, il peut se déplacer à une vitesse de 3 centimètres par seconde sur différents types de terrain. Il peut être plié ou se faire écraser, puis continuer à se mouvoir.
Si vous détestez les insectes, vous allez complètement changer d’avis après avoir vu ces images
A l’EPFL, des chercheurs de la Faculté des sciences et techniques de l’ingénieur ont mis au point un robot insecte souple baptisé DEANsect. Il se déplace à une vitesse de trois centimètres par seconde grâce à des muscles artificiels. Deux versions de ce robot indestructible ont été mises au point.
[bctt tweet=”Des chercheurs ont créés un robot indestructible de la taille d’une mouche” username=”tedidevblog”]
La première version, qui fonctionne avec des fils ultra-fins, est extrêmement robuste : elle peut être pliée, se faire écraser par une tapette à mouches ou par un pied humain, puis continuer à se mouvoir.

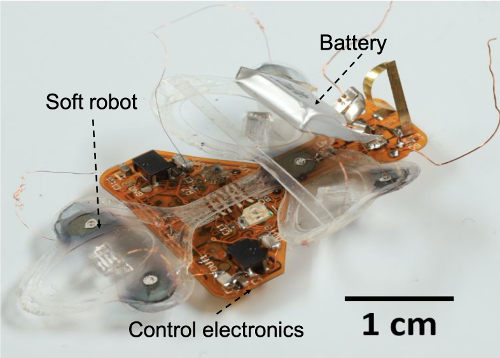
La deuxième version est autonome et sans fil, et pèse moins d’un gramme. Ce dernier transporte sa batterie et tous les composants électroniques sur son dos. Un microcontrolleur fait office de cerveau, et des photodiodes constituent ses yeux. Doté d’intelligence, il est capable de reconnaître des motifs blancs ou noirs, et donc de suivre une ligne tracée sur le sol.
Insolite: Les chimères que les hommes ont créés et leurs raisons d’êtres
La technologie DEANsect a été mise au point au Laboratoire de microsystèmes souples (LMTS), en collaboration avec le Laboratoire des actionneurs intégrés (LAI) de l’EPFL et l’université de Cergy-Pontoise, en France. Elle fait l’objet d’une publication Science Robotics.
Le déplacement du robot par vibration
La légèreté et la rapidité du robot insecte reposent principalement sur l’utilisation de muscles artificiels – ou actionneurs élastomères diélectriques (DEA)- de la taille d’un cheveu, qui permettent au robot d’avancer par «vibration». Le petit robot peut ainsi monter et descendre, et évoluer sur différents terrains. Les muscles artificiels sont composés d’une membrane en élastomère, prise en sandwich entre deux électrodes souples. Lorsqu’une tension est appliquée, les électrodes sont attirées l’une vers l’autre, compressant la membrane. Cette dernière revient à sa forme originelle lorsque la tension est éteinte. De tels muscles équipent les trois pattes du robot-insecte, et le mouvement est généré en allumant et éteignant la tension de façon extrêmement rapide : plus de 400 fois par seconde. Pour que les muscles artificiels de DEAnsect puissent fonctionner avec des tensions relativement basses, les chercheurs ont utilisé des techniques de nanofabrication qui permettent de diminuer l’épaisseur de l’élastomère, et fabriquer des électrodes épaisses de quelques molécules, qui sont à la fois souples et hautement conductrices.
Les 12 phénomènes naturels les plus étranges de notre planète avec vidéo à l’ appuie
Cette astuce permet de réduire drastiquement la taille de l’alimentation. «Habituellement, plusieurs kilovolts sont nécessaires pour faire foncitonner les DEAs, et la source d’alimentation est volumineuse», explique Herbert Shea, directeur du LMTS. «Notre robot peut quant à lui transporter sur son dos tout ce qui est nécessaire à son fonctionnement, alors que lui-même ne pèse que 0.2 gramme.»
Cette avancée crée de nouvelles possibilités pour une utilisation généralisée des DEAs en robotique. Pour la création d’essaims d’insectes robotiques intelligents, par exemple, pour effectuer des réparations à distance, ou pour mieux comprendre les colonies d’insectes, en envoyant un robot vivre parmi eux. «Nous travaillons actuellement avec l’université Stanford, afin de réaliser une version sans fil entièrement souple de DEANsect », annonce Herbert Shea. «Par la suite, nous doterons les robots de nouveaux capteurs et émetteurs, afin qu’ils puissent communiquer entre eux.»
Les 16 fameux mystères que le monde a oublié qu’ils ont été résolus
Référence :
Xiaobin Ji, Xinchang Liu, Vito Cacucciolo, Matthias Imboden, Yoan Civet,
Alae El Haitami, Sophie Cantin, Yves Perriard & Herbert Shea, “An autonomous
untethered fast soft robotic insect driven by low-voltage dielectric elastomer actuators,”
Science Robotics, 4, eaaz6451 (2019)
Liens
Dossier de presse : https://go.epfl.ch/insectrobot
Contact
Herbert Shea
Laboratoire de microsystèmes souples (LMTS)
EPFL
Anglais / Français
Tél.: +41 21 693 66 63 / +41 79 349 71 66
Email: [email protected]
Xiaobin Ji
Laboratoire de microsystèmes souples (LMTS)
EPFL
Français / Mandarin
Tél. : +41 21 695 4463
Email : [email protected]
Conclusion
Vous serez peut être intéressé par 3 raisons pour lesquelles une bouteille d’eau dans la voiture peut vous coûter la vie et Comment apprendre ? La bonne méthode.
